

Int J Performability Eng ›› 2019, Vol. 15 ›› Issue (2): 688-699.doi: 10.23940/ijpe.19.02.p33.688699
Previous Articles Next Articles
Wenhui Lia, Feng Qua*( ), and Peixun Liub
), and Peixun Liub
Revised on
;
Accepted on
Contact:
Qu Feng
E-mail:qufeng_jlu@163.com
Wenhui Li, Feng Qu, and Peixun Liu. Vehicle Detection on Unmanned Aerial Vehicle Images based on Saliency Region Detection [J]. Int J Performability Eng, 2019, 15(2): 688-699.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Figure 1
Comparisons between state-of-the-art saliency detection algorithms"
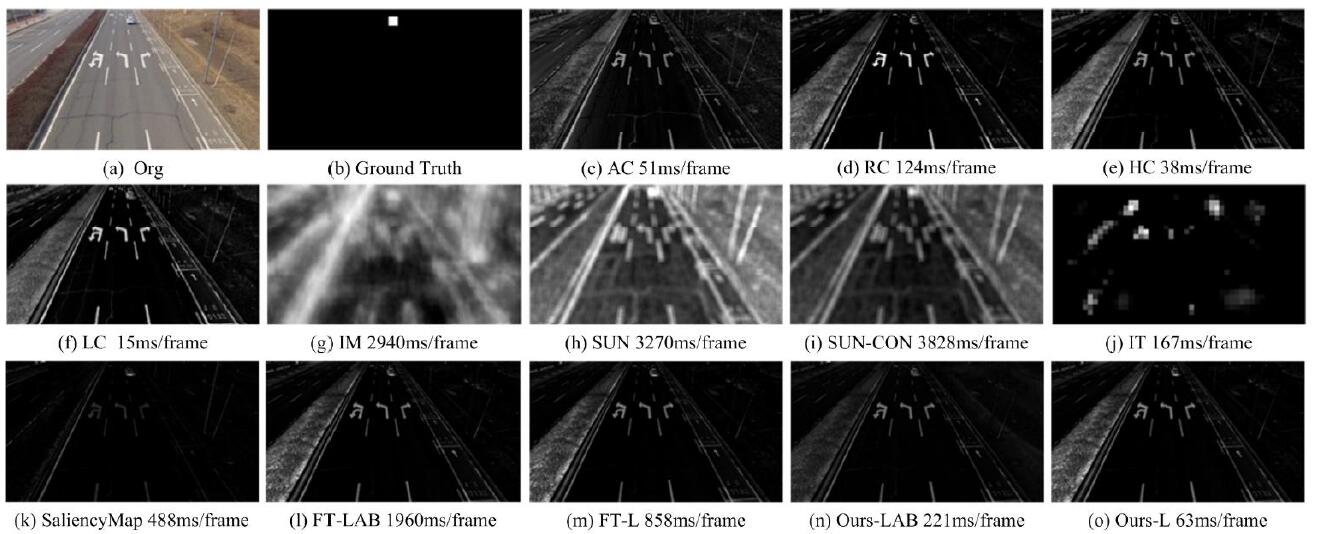

Figure 2
Saliency region detection results comparison between [28] and our methods"
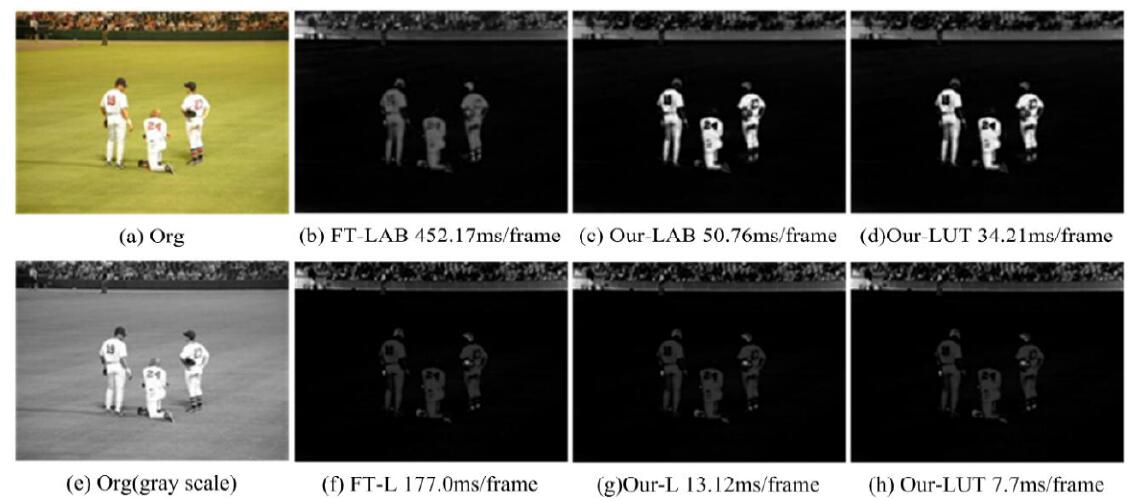

Figure 3
Comparison between target region of interest segmentation methods"
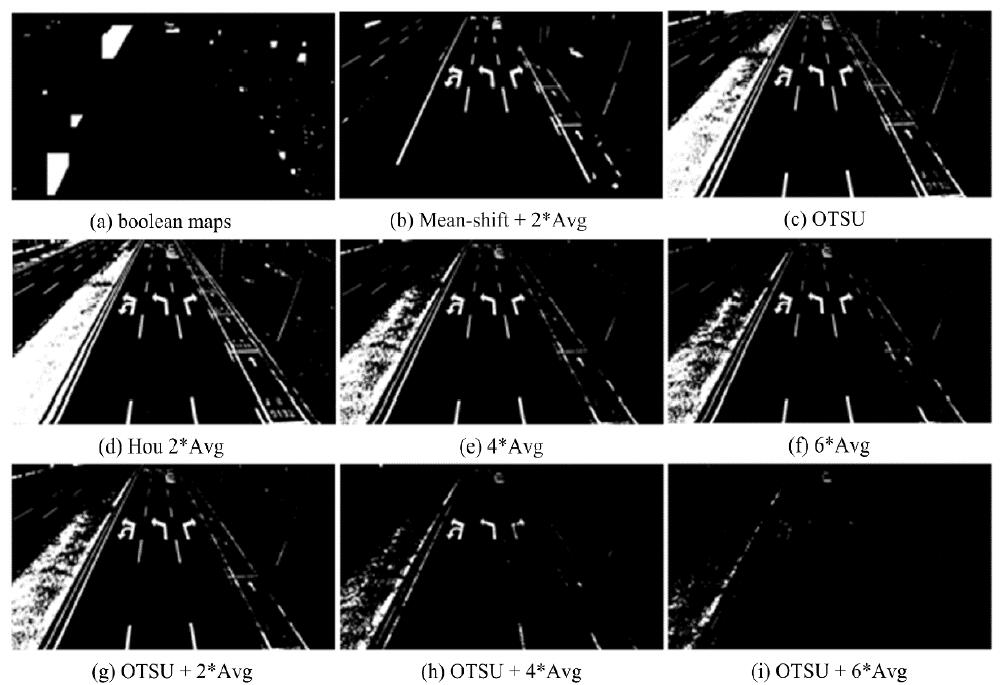
Figure 4
Results of target region of interest segmentation method"
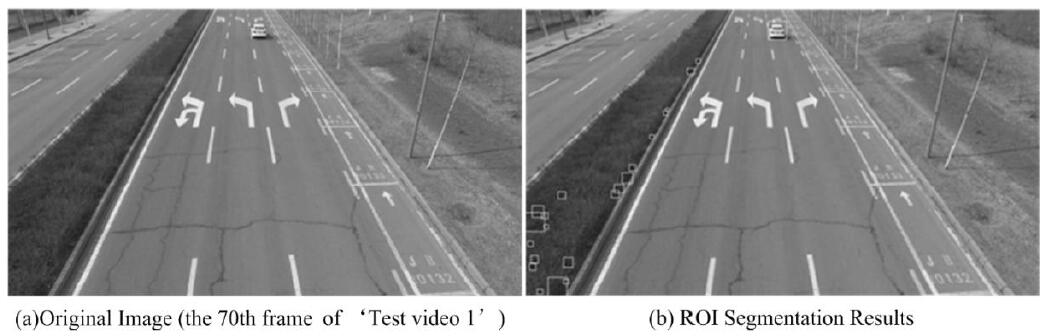

Figure 5
Vehicle (long) horizontal edges and their corresponding vehicle waves of Rois"
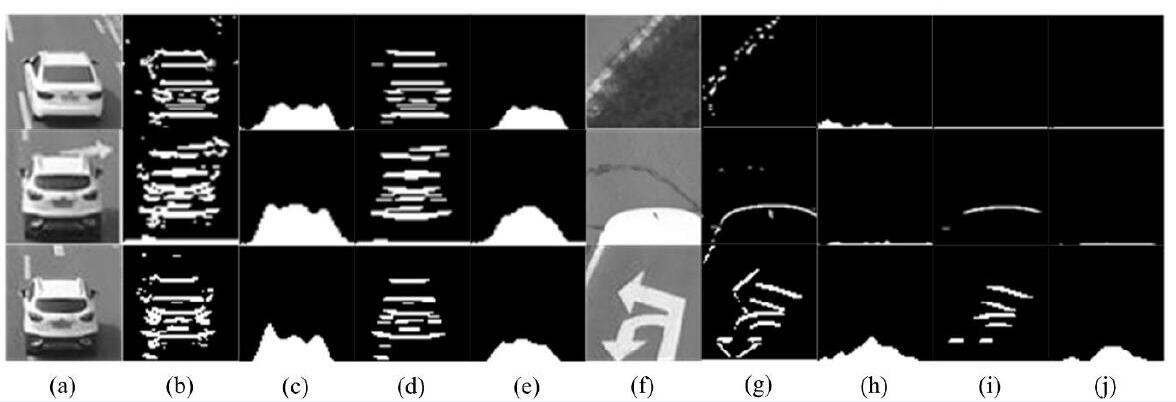

Figure 6
Results of vehicle veri?cation algorithm based on horizontal edge wave"
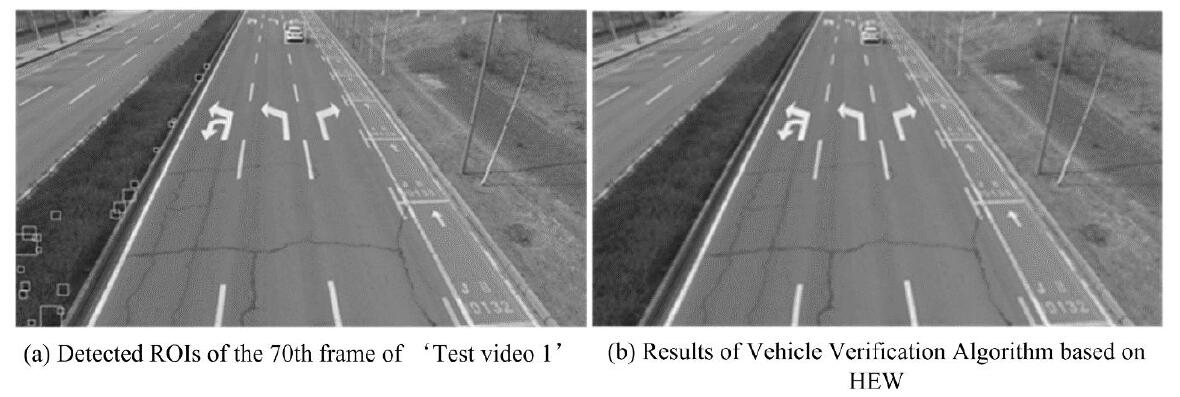
Table 1
Details of test videos"
| Videos | Frame amount | Vehicle Amount | Resolution | Road condition | Weather condition | Largest vehicle amount |
|---|---|---|---|---|---|---|
| Test video 1 | 500 | 520 | 960 | urban | cloudy | 2 |
| Test video 2 | 216 | 332 | 960 | urban | sunny | 3 |
| Test video 3 | 500 | 1394 | 960 | urban | sunny | 7 |

Figure 7
Algorithms results comparison"
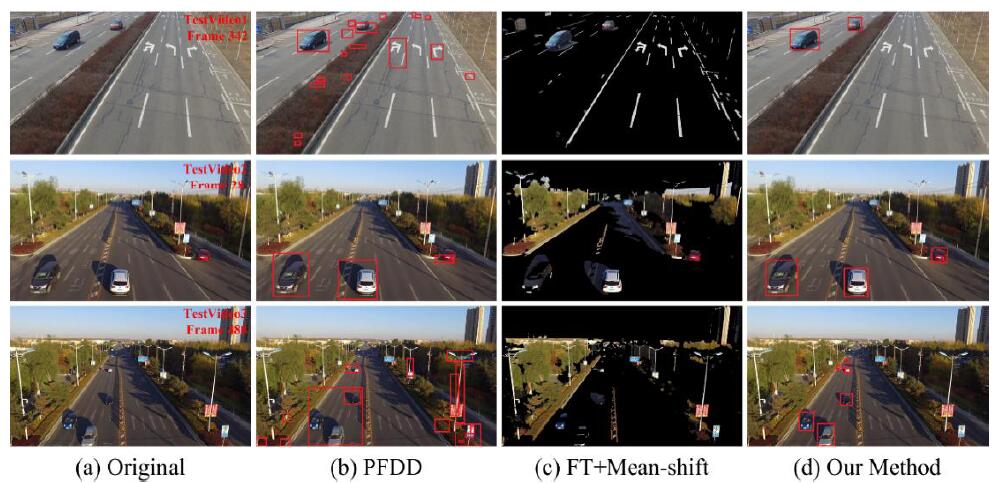
Table 2
Algorithm indicators comparison"
| Scene | Metrics | PFD | FT + Mean-shift [ | Our Method |
|---|---|---|---|---|
| Test video 1 | Correctness (%) | 34.2 | 27.3 | 85.8 |
| Completeness (%) | 100 | 100 | 96.2 | |
| Quality (%) | 34.2 | 27.3 | 82.9 | |
| Test video 2 | Correctness (%) | 47.7 | 9.3 | 93.3 |
| Completeness (%) | 69.9 | 100 | 100 | |
| Quality (%) | 39.6 | 9.3 | 93.3 | |
| Test video 3 | Correctness (%) | 12.1 | 12.9 | 90.4 |
| Completeness (%) | 95.2 | 96.0 | 95.5 | |
| Quality (%) | 10.5 | 11.4 | 44.1 |
Table 3
Computational load comparison (ms/frame)"
| Scene | PFD | FT + Mean-shift | Our Method | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Max | Min | Avg | Max | Min | Avg | Max | Min | Avg | |
| Test video 1 | 106 | 38 | 43 | 31652 | 30474 | 30864 | 229 | 201 | 204 |
| Test video 2 | 60 | 54 | 56 | 36836 | 35208 | 35484 | 228 | 218 | 220 |
| Test video 3 | 112 | 54 | 55 | 38761 | 36025 | 37204 | 235 | 218 | 221 |
| [1] | G. Liu, S. Liu, K. Muhammad, A. K. Sangaiah, F. Doctor , “Object Tracking in Vary Lighting Conditions for Fog based Intelligent Surveillance of Public Spaces,”IEEE Access, Vol. 6, pp. 29283-29296, 2018 |
| [2] |
C. L. Azevedo, J. L. Cardoso, M. Ben-Akiva, J. P. Costeira, M. Marques , “Automatic Vehicle Trajectory Extraction by Aerial Remote Sensing,” Procedia - Social and Behavior Sciences, Vol. 111, pp. 849-858, Febuary 2014
doi: 10.1016/j.sbspro.2014.01.119 |
| [3] |
A. C . Shastry and R. A. Schowengerdt, “Airborne Video Registration and Traffic-Flow Parameter Estimation,” IEEE Transactions on Intelligent Transportation Systems, Vol. 6, No. 4, pp. 391-405, December 2005
doi: 10.1109/TITS.2005.858621 |
| [4] |
Y. Wu, H. Sun, P. Liu , “A Novel Fast Detection Method of Infrared LSS-Target in Complex Urban Background,” International Journal of Wavelets, Multiresolution and Information Processing, Vol. 16, No. 1, pp. 1850008, January 2018
doi: 10.1142/S021969131850008X |
| [5] |
H. Yalcin, M. Hebert, R. Collins, M. J. Black, “A Flow-based Approach to Vehicle Detection and Background Mosaicking in Airborne Video,” in Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), Vol. 2, pp. 1202-1202, 2005
doi: 10.1109/CVPR.2005.29 |
| [6] |
T. S. C. Tan , “Colour Texture Analysis using Colour Histogram,” IEE Proceedings - Vision, Imageand Signal Processing, Vol. 141, No. 6, pp. 403, 1994
doi: 10.1049/ip-vis:19941420 |
| [7] | H. Bay, A. Ess, T. Tuytelaars, L. Van Gool , “Speeded-Up Robust Features (SURF),” Computer Vision and Image Understanding, Vol. 110, No. 3, pp. 346-359, June 2008 |
| [8] |
S. Leutenegger, M. Chli, R. Y. Siegwart, “BRISK: Binary Robust Invariant Scalable Keypoints, ” in Proceedings of 2011 International Conference on Computer Vision, pp. 2548-2555, 2011
doi: 10.1109/ICCV.2011.6126542 |
| [9] | A. Alahi, R. Ortiz, P. Vandergheynst, “FREAK: Fast Retina Keypoint, ” in Proceedings of 2012 IEEE Conference on Computer Vision and Pattern Recognition, pp. 510-517, 2012 |
| [10] | S. Liu, X. Cheng, W. Fu, Y. Zhou, Q. Li , “Numeric Characteristics of Generalized M-Set with its Asymptote,” Applied Mathematics and Computation, Vol. 243, pp. 767-774, September 2014 |
| [11] |
X. Cao, C. Wu, J. Lan, P. Yan, X. Li , “Vehicle Detection and Motion Analysis in Low-Altitude Airborne Video under Urban Environment,” IEEE Transactions on Circuits and Systems for Video Technology, Vol. 21, No. 10, pp. 1522-1533, October 2011
doi: 10.1109/TCSVT.2011.2162274 |
| [12] |
J. Leitloff, D. Rosenbaum, F. Kurz, O. Meynberg, P. Reinartz , “An Operational System for Estimating Road Traffic Information from Aerial Images,” Remote Sensing, Vol. 6, No. 11, pp. 11315-11341, November 2014
doi: 10.3390/rs61111315 |
| [13] |
X. Cao, C. Wu, P. Yan, X. Li, “Linear SVM Classification using Boosting HOG Features for Vehicle Detection in Low-Altitude Airborne Videos, ” in Proceedings of 2011 18th IEEE International Conference on Image Processing, pp. 2421-2424, 2011
doi: 10.1109/ICIP.2011.6116132 |
| [14] |
S. Tuermer, F. Kurz, P. Reinartz, U. Stilla , “Airborne Vehicle Detection in Dense Urban Areas using HoG Features and Disparity Maps,” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, Vol. 6, No. 6, pp. 2327-2337, December 2013
doi: 10.1109/JSTARS.2013.2242846 |
| [15] | P. F. Felzenszwalb, R. B. Girshick, D. McAllester, D. Ramanan , “Object Detection with Discriminatively Trained Part-Based Models,” IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 32, No. 9, pp. 1627-1645, September 2010 |
| [16] | Y. Xu, G. Yu, Y. Wang, X. Wu , “Vehicle Detection and Tracking from Airborne Images,” in Proceedings ofCICTP 2015, pp. 641-649, 2015 |
| [17] |
Y. Xu, G. Yu, X. Wu, Y. Wang, Y. Ma , “An Enhanced Viola-Jones Vehicle Detection Method from Unmanned Aerial Vehicles Imagery,” IEEE Transactions on Intelligent Transportation Systems, Vol. 18, No. 7, pp. 1845-1856, July 2017
doi: 10.1109/TITS.2016.2617202 |
| [18] | W. Li, P. Liu, Y. Wang, H. Ni, C. Wen, J. Fan , “On-Board Robust Vehicle Detection using Knowledge-based Features and Motion Trajectory,” International Journal of Signal Processing, Image Processingand Pattern Recognition, Vol. 8, No. 2, pp. 201-212, February 2015 |
| [19] |
S. Liu, Z. Zhang, L. Qi, M. Ma , “A Fractal Image Encoding Method based on Statistical Loss Used in Agricultural Image Compression,” Multimedia Tools and Applications, Vol. 75, No. 23, pp. 15525-15536, December 2016
doi: 10.1007/s11042-014-2446-8 |
| [20] | R. Achanta, F. Estrada, P. Wils, S. Süsstrunk , “Salient Region Detection and Segmentation,” in Proceedings of International Conference onComputer Vision Systems, pp. 66-75, Berlin, Heidelberg, 2008 |
| [21] | M. M. Cheng, N. J. Mitra, X. Huang, P. H. S. Torr , and S. M. Hu, “Global Contrast based Salient Region Detection,” IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015 |
| [22] | M.-M. Cheng, G. Zhang, N. J. Mitra, X. Huang, and S.-M. Hu, “Global Contrast based Salient Region Detection,” in Proceedings ofCVPR 2011, pp. 409-416, 2011 |
| [23] | Y. Zhai and M. Shah, “Visual Attention Detection in Video Sequences using Spatiotemporal Cues,” in Proceedings of the 14th Annual ACM International Conference on Multimedia, pp. 815, 2006 |
| [24] |
N. Murray, M. Vanrell, X. Otazu, C. A. Parraga , “Saliency Estimation using a Non-Parametric Low-Level Vision Model,” in Proceedings ofCVPR 2011, pp. 433-440, 2011
doi: 10.1109/CVPR.2011.5995506 |
| [25] |
L. Zhang, M. H. Tong, T. K. Marks, H. Shan, G. W. Cottrell , “SUN: A Bayesian Framework for Saliency using Natural Statistics,” Journal of Vision, Vol. 8, No. 7, pp. 32, December 2008
doi: 10.1167/8.7.32 pmid: 19146264 |
| [26] | D. Walther , “Interactions of Visual Attention and Object Recognition: Computational Modeling, Algorithms, and Psychophysics,” California Institute of Technology, 2006 |
| [27] |
J. Lou, W. Zhu, H. Wang, M. Ren , “Small Target Detection Combining Regional Stability and Saliency in a Color Image,” Multimedia Tools and Applications, Vol. 76, No. 13, pp. 14781-14798, July 2017
doi: 10.1007/s11042-016-4025-7 |
| [28] | R. Achanta, S. Hemami, F. Estrada, S. Susstrunk, “Frequency-Tuned Salient Region Detection,” in Proceedings of 2009 IEEE Conference on Computer Vision and Pattern Recognition, pp. 1597-1604, 2009 |
| [29] | R. Achanta, “Saliency_Map_Comparison,” 2009, () http://ivrlwww.epfl.ch/supplementary_material/RK_CVPR09/ |
| [30] |
N. Otsu , “A Threshold Selection Method from Gray-Level Histograms,” IEEE Transactions on Systems, Man, and Cybernetics, Vol. 9, No. 1, pp. 62-66, January 1979
doi: 10.1109/TSMC.1979.4310076 |
| [31] |
X. Hou and L. Zhang, “Saliency Detection: A Spectral Residual Approach, ” in Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, pp. 1-8, 2007
doi: 10.1109/CVPR.2007.383267 |
| [32] | W. Li, P. Liu, Y. Wang, H. Ni , “Multifeature Fusion Vehicle Detection Algorithm based on Choquet Integral,” J. Appl. Math., Vol. 2014, pp. 1-11, 2014 |
| No related articles found! |
|
||