The viscoelastic material constitutive relationship is relatively complex in the engineering practice. People often use the Prony series method to fit experimental data. A lower number of terms leads to lower accuracy, but a higher number of terms leads to difficulty of fitting.Thus, a custom neural network model was put forward to replace the traditional algorithm in the Prony series fitting process. Based on each specific form of the Prony series constructed corresponding activation function of the hidden layer in the neural network, the number of neurons in the neural network corresponded to the number of the Prony series. A numerical example showed that the custom neural network can achieve good fitting results. It is convenient and appropriate to select the number of terms and also shows rapid convergence and high accuracy.
Keywords: viscoelastic material;
custom neural network;
the Prony series;
fitting
Yun He, Haibin Li, and Juan Du. Fitting Methods based on Custom Neural Network for Relaxation Modulus of Viscoelastic Materials. International Journal of Performability Engineering, 2019, 15(1): 107-115 doi:10.23940/ijpe.19.01.p11.107115
1. Introduction
Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11].
Neural networks in the parameter fitting of viscoelastic materials also have many applications.Gasperlin et al. put forward predicting the viscoelastic behaviour of emulsion systems through a neural network based mathematical model. It had certain precision [12]. Zeng and Shu gave an equivalence relation of a three layer delay feed forward neural network to the Green Rivlin nonlinear viscoelastic constitutive equation, which solved the nuclear function by the network in various order of the G R equation. They pointed out that the neural network method can be widely applied to the material constitutive relation research [13]. Al-Haik et al. studied the stress relaxation behavior of polymer composites based on artificial neural networks. They accurately predicted a wider range of nonlinear viscoelastic models[14]. Saeidirad et al. studied the viscoelastic behavior of pomegranates with an artificial neural network, and the predicted results were more accurate [15]. Zheng et al.studied the method of whole loading process of relaxation modulus based on a genetic algorithm to accurately obtain the viscoelastic constitutive parameters of HTPB composite solid propellant [16].
Obtaining the viscoelastic material parameter fitting expression is an issue that has received much attention, and the traditional method is unable to create a neural network according to the specific problems. Aiming at this, a custom neural network is applied to fitting and issimple, effective, and accurate.
The remainder of this paper is outlined as follows. Section 2 discusses Prony series expression of viscoelastic material performance parameters. In Section 3, weconstructa custom neural network based on Pronyseries. In Sections 4 and 5, anumerical example is introduced and the resultsare analysed. Finally, Section 6 concludes with recommendations for future work.
2. Prony Series Expression of Viscoelastic Material Performance Parameters
2.1. Prony Series Expression of Viscoelastic Material Performance Parameters
The Maxwell model or generalized Kelvin model are commonly used in the analysis of viscoelastic stress (strain). Because the combination of the elastic element and the cohesive element is increasingly complicated, the stress-strain relationship of the model, or the constitutive relation, can better reflect the actual situation of viscoelastic material. In general, we often use the generalized Kelvin model to inspect the creep effects of viscoelastic materials, and we use the generalized Maxwell model to observe the relaxation effect of viscoelastic materials. This article is aimed at fitting the relaxation modulus; therefore, it elaborates on the generalized Maxwell model in detail.
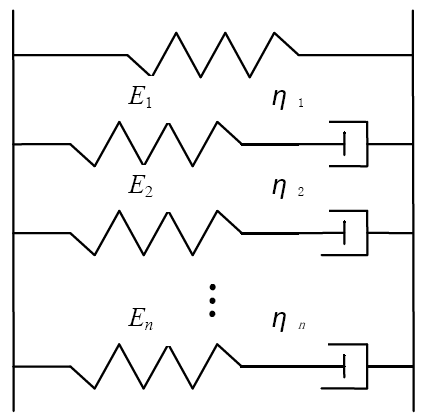
The multiple Maxwell model and a spring in parallel is the generalized Maxwell model, as shown in Figure 1, where Ei is the elastic modulus of the ith original elastic and ${{\eta }_{i}}$ is the viscosity coefficient of the ith original viscosity. Each Maxwell model of the stress-strain relationship is $\dot{\varepsilon }\text{=}{{\sigma }_{i}}/{{\eta }_{i}}+{{\dot{\sigma }}_{i}}/{{E}_{i}}$. By differential operator, the stress ofexpressionis${{\sigma }_{i}}=\frac{{{E}_{i}}{{\eta }_{i}}}{{{E}_{i}}+{{\eta }_{i}}D}D\varepsilon $, $D=d/dt.$ Adding up the stress of each Maxwell model, the spring stress is the total stress of the generalized Maxwell model [17-18], that is,
References [18-19] provided the derivation process forthe constitutive relation and integral constitutive relation of the generalized Maxwell model. The expression of the relaxation modulus of $Y(t)$ is
Where $Y(t)$ is the relaxation modulus of each Maxwell model and ${{Y}_{e}}$ is the equilibrium parameter.Equation (2) is expressed in the Prony series of the relaxation modulus, elaborating all the meanings in the following paragraphs.
2.2. Neural Network Structure based on Prony Series
In the traditional fitting method, we use the Prony series fitting method to fitting the material relaxation modulus, and selecting a low number leads to poor fitting precision. However, if an infinite number is takenin order to pursue precision, this instead complicates the expression and makes fitting difficult. The fractional derivative model fitting has higher fitting precision than the Prony series, and the fitting parameters are less than those of the Prony series. However, the fractional derivative model also has some disadvantages, such as a complex constitutive equation derivation process, and the Mittag-Leffler function in the selection of the series number determines the complexity of the constitutive equation [18]. The neural network has the ability to gain any function approximation with any degree of accuracy; thus, it has been widely used in function fitting.
The traditional neural network usually useslogsig general functions and the tansig function as the transfer function of neurons. It can act as a general function approximation. Its disadvantage is that the traditional neural network model does not correspond to the physical model (fitting formula), so the generalization ability is poor. Though the traditional transfer function involves repeated verification by people, it has better accuracy, stability, and strong calculation, and it can be applied tomost data calculations. However, its calculation process and fitting formula are renegade and cannot correspond with a specific calculation formula.
To address this, the instance analysis below uses a custom neural network. The transfer function is based on a specific formula of Equation (2) and combines the neural network and fitting formula together. The neural network weights and threshold can correspond to the elasticity modulus and viscosity coefficient. We can obtain parameters of the generalized Maxwell model from training after the network structure, providing convenience for engineering practice.
A neural network is created by a standard toolkit network that creates functions and corresponds to a certain network type. However, different learning training algorithms will not be able to use the standard function to create. This requires the application of a custom network method. A custom network is implemented by invoking the network function. The network object contains many properties, thereby changing the network structure, algorithm, function, etc. Reference [20] gives a specific custom neural network program.
3. Custom Neural Network Construction based on Prony Series
3.1. Custom Neural Network Mode
Our purpose isto use the neural network structure created material relaxation modulus expression. The Prony series serves as an effective form of relaxation modulus. Therefore, we should consult the Prony series to determine the form of the structure of the network. Referencing Equation (2), the shear modulus of Prony series can be expressed as
Where ${{\tau }_{i}}={{\eta }_{i}}/{{G}_{i}}$, ${{G}_{e}}=G(\infty )$, and $G(\infty )$ are the equilibrium modulus, ${{G}_{i}}$ is the shear modulus of elasticity of each Maxwell model, and ${{\eta }_{i}}$ is the viscous coefficient [21].
In Equation (3), firstly, t independent variables are calculated through the weighted index, followed by the index proceeded linear weighted superposition. This structure is similar to the neural network structure. With this characteristic, the network weights correspond to the weighted coefficient and the network thresholds correspond to the constant term in the formula. We regard the exponential function as the network transfer function. Because of the rationality of the Pronyseries fitting, the custom neural network fitting method for shear modulus is a reasonable method. The following custom concrete structure of the neural network is presented.
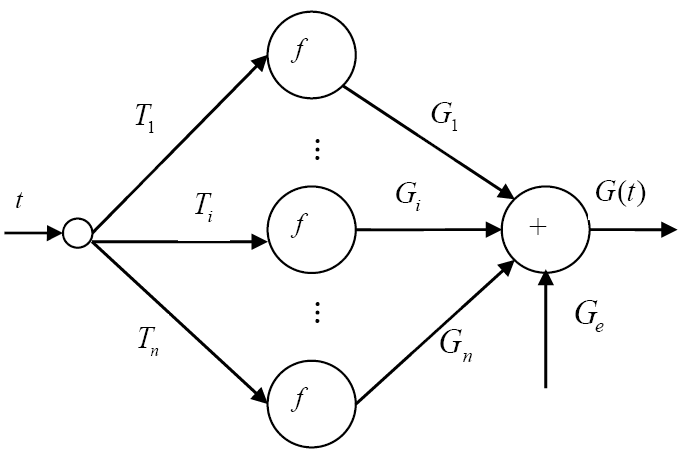
The network shown in Figure 2 has three layers. Among them, the input layer and output layer include one input unit, and the number of hidden layer neurons determines the series number of the Prony series. t(time) is the input, and $G(t)$ (shear modulus) is the output. ${{T}_{i}}=1/{{\tau }_{i}}$ is the weight between the input layer and hidden layer, and the threshold of the hidden layer is set to none by the unique function of custom neural networks. ${{G}_{i}}$ is the weight between the hidden layer and output layer, and ${{G}_{e}}$ is the threshold of the output layer. The transfer function of hidden layer neurons is an exponential function whose expression is $f={{e}^{-x}}$. The transfer function of neurons in the output layer is purelin, that is, a linear transfer function.
According to the above three layers of custom neural network structure, in the network learning process, the calculation formula for the neural network hidden layer unit output value is
${{y}_{i}}={{e}^{-{{T}_{i}}t}}$
The calculating formula for the output layer is
$G=\sum\limits_{i}{{{G}_{i}}{{y}_{i}}}+{{G}_{e}}$
In this paper, we use the mean square error function as the performance function of the neural network. It is used to evaluate the difference between the actual network output and the target, and the formula is given in [13]. For q samples of network output, the form is
where $A(j)$ is the jth expected value of the network output sample.
The L-M training algorithm is used to adjust network weights and thresholds. When the network converges, the network weights and thresholds can be transformed into coefficients in the Prony series of viscoelastic material shear modulus to complete the material model modelling.
4. Numerical Example Simulation
4.1. Instance Data Preparation
As a standard example, a viscoelastic material shear modulus changes over time in the case of constant temperature, as shown in Table 1. A part of experimental data isused to train the neural network. Another part of experimental data is used to test the calculation results of the neural network.
Based on the above data structure of neural network training samples, because the order of magnitude of data gap islarger, we normalize processing to facilitate the training of the neural network and data processing. The neural network’s input and output data are normalized in the range of [a, c]. The normalization formula is
where $x$ is the original data, ${{x}_{n}}$ is the data of normalization, ${{x}_{\min }}$the is minimum value of the original data, and ${{x}_{\max }}$ is the maximum value of the original data.
After completion of the neural network training and simulation, the normalized data reverse the original data. The reverse normalization formula is
According to the above example, because the parameters are positive values in the Prony series, the neural network’s weights and thresholds correspond to the parameters in the Prony series. Therefore, in order to ensure that the neural network weights and thresholds are positive values, take a = 1 and c = 11.
After training of the custom neural network, use mathematical derivation of the weights and thresholds after training to obtain the weights and threshold before normalization. This is each parameter of the Prony series. The formula is
Where ki is the weight between the input layer and hidden layer (vector), wi is the weight between the hidden layer and output layer (vector), andbis the threshold of the output layer.
4.3. Selection of Parameters
When the neuron number of hidden layer is n,the empirical Equation[21] is
Where nin s the neuron number of the input layer, ${{n}_{\text{out}}}$ is the neuron number of the output layer, and ${{n}_{\text{s}}}$ is constant for [1,10].
For the above example, the neuron number of the hidden layer was taken as $n=2, 3,\cdots , 11.$ Through repeated training, the simulation results of different neuron numbers of the hidden layer are compared. We obtained the proper neuron number of the hidden layer.
5. Results Analysis
The experimental data is divided into training set and test set. We useten groups as the training set and six groups as the test set. The training set is shown in Table 2. At the same time, new data can also be added to train and test.
Take $n=2, 3,\cdots , 11$ and the transfer function of hidden layer neurons as $f={{e}^{-x}}.$ After training 2000 steps, the maximum relative error of the test set and each parameter value of the corresponding Prony series can be calculated, and they are listed in Table 3.
Table 3
Table 3.Fitting parameters and error after custom neural network training
As can be seen from Table 3, the error is minimized when the neuron number is 3. When the number of neurons increases, the error continues to increase. According to the above results, the maximum relative error of the test results is small, which shows that the network weights and threshold achieved good fitting results.
Using the training samples in Table 2, the number of hidden layer units is taken as $n=2, 3,\cdots , 11$. The maximum relative error calculated by the BP neural network method after training 2000 steps is shown in Table 4.
Table 4
Table 4.Fitting error after BP neural network training
Prony series fitting is done by using the same training samples through the Prony series fitting method in Ansys software. When the number of items is taken separately as $n=1, 2,\cdots , 4$, the maximum relative error in the test sample is shown in Table 5.
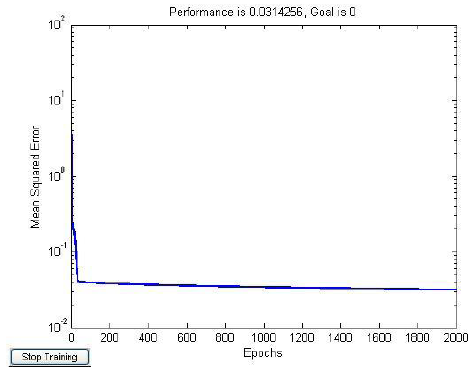
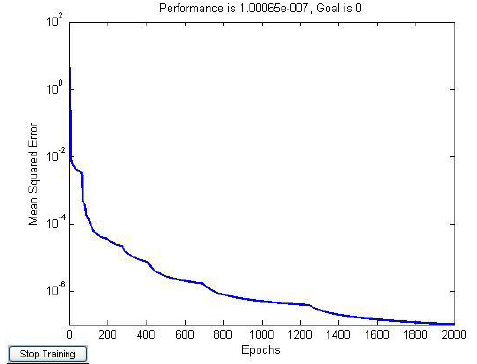
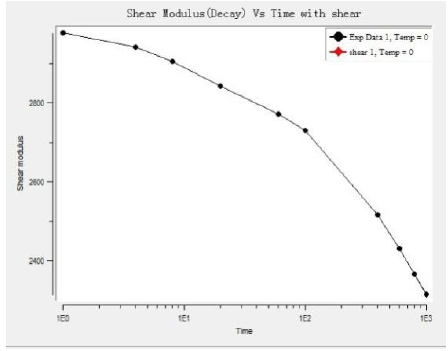
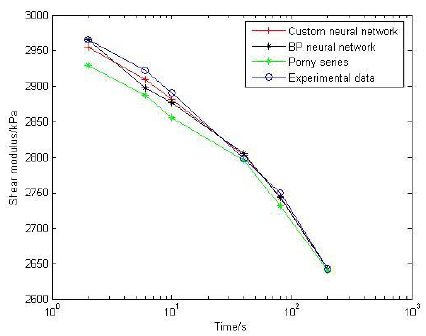
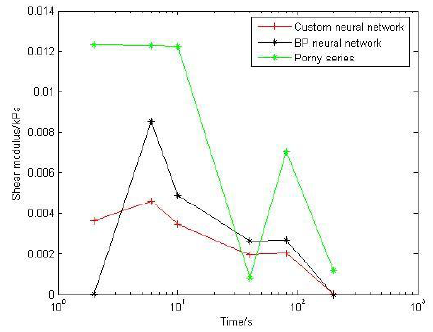
In order to facilitate comparison, the above three fitting methods are taken simultaneously as $n=3$, and the training error convergence curves of the custom neural network and BP neural network are respectively shown in Figures 3 and 4. The fitting curve of the Prony series in the Ansysis shown in Figure 5. Through the simulation of test sample points, the calculation results of the shear modulus are shown in Table 6. Figure 6 shows the comparison between the calculated results of test sample points and the experimental data. The maximum relative error is shown in Figure 7.
It can be seen from the simulation results in Table 6 that the error of the traditional BP neural network method is larger than that of the proposed method in this paper. Therefore, the results of the custom neural network method are acceptable. However, the weights and thresholds of the BP neural network cannot correspond to the elastic modulus and viscous coefficient of the generalized Maxwell model, and the concrete structure of the generalized Maxwell model cannot be inversely derived. This is a major drawback of traditional neural network parameter fitting. However, the exact parameters of the generalized Maxwell model can be inversely deduced while the method of custom neural network is used to accurately fit the shear modulus.
As shown in Table 6, when the Prony series term is 3, the maximum relative error is 1.24%. Through the results, it can be seen that the maximum relative error in each fitting point of this method is larger than the maximum relative error of the neural network calculation under the same fitting terms. As shown in Table 5, the higher the number of chosen Prony series, the more complicated the calculation process.
6. Conclusions
Through the generalized Maxwell model of viscoelastic material Prony series fitting research, we found a custom neural network method to fit the relaxation modulus of viscoelastic materials. The custom neural network can select the transfer function, weights, and threshold according to the particular form of expression, and the neural network also has specific physical meaning. Through the example analysis, the custom neural network training error is shown to be smaller, and the convergence is faster. The test results also showed that the weights and thresholds of the neural network model, namely the fitting of the shear modulus and viscosity coefficient, reached a very high accuracy. The parameters in the generalized Maxwell model can be obtained from the trained network to facilitate the engineering practice.By the same theory, the creep compliance of the generalized Kelvin model can also be fitted in the same way. Therefore, it is a good method to fit the modulus compliance and other parameters of viscoelastic materials using a limited set of samples after training the neural network.
Acknowledgements
This researchis supported by the National Natural Science Foundation of China (No. 11262014).
The multidata method was originally proposed to fit a Prony exponentialseries function to experimental viscoelastic modulus and compliance data;this was accomplished by the application of a linear least squares solver.This paper considers a similar approach, but extended in two key ways.First, it has been applied to the solution of convolution integralequations; specifically those used for material function interconversion.Second, it has been modified to force the signs of the Prony seriescoefficients to be positive; this is an essential criterion for the properphysical interpretation of a Prony series material function, which istypically not satisfied by multidata method solutions. Sign control isimplemented by an iterative Levenberg arquardt solution algorithm withan appropriate constraint, and can be used for both fitting experimentaldata and interconversion. To use the method, a Prony series must becapable of adequately representing the applicable functions. The method isdemonstrated by first fitting and converting experimental modulus data.Formulation for a composite lamina is also shown, in which a system ofintegral equations is reduced to a single integral equation; this can thenbe solved using the new method. Finally, application of the new method tofrequency domain transformations is demonstrated, along with comparisonsto other techniques.
B. X.Yin,
“Curve Fitting Calculate Viscoelastic Material Constant, ”
Journal of Southwest Institute of Technology, Vol. 14, No. 4, pp. 28-32, 1999
The stress relaxation of two different polymers under a constant strain has been studied and approached by using a fractional Maxwell model in which the stress appears as a noninteger-order derivative of the strain. To obtain an accurate approximation of the experimental data for the model, two noninteger values for the derivative order are required. These values are related to two relaxation types. For short times, the derivative order is smaller and near zero, which indicates behavior close to the ideal elastic solid. For long times the derivative order is higher, showing more plastic behavior. In this work some classic models are revised and the fractional Maxwell model is used to fit the experimental data. Finally, the complex fractional modulus, the two derivative orders, and the relaxation times for samples of polycarbonate and poly(vinyl chloride) are obtained.
J.W.Huang and B. X.Yin,
“The Fitting Method of Viscoelastic Material Constant, ”
Journal of Huazhong University of Science and Technology, Vol. 22, No. 4, pp. 88-90, 2005
A procedure to identify the viscoelastic material parameters of a solid amorphous polymer and to estimate their values is presented. Stress train material data is obtained for the polymer by a compression experiment. The material behavior of the polymer is modeled according to the generalized Maxwell model, which is fitted to the experimental data by the method of least squares to obtain a first approximation for the model parameters. The identification of the model parameters is completed by a Markov chain Monte Carlo (MCMC) method, which generates the probability distributions of the relevant parameters of the material. The utilized MCMC method enables us to determine a suitable complexity (i.e., the number of Maxwell elements) for the generalized Maxwell model, so that the model best fits the data and, simultaneously, leads to an identifiable set of parameters. The numerical results imply that the uniqueness of the solution is lost when the number of model parameters becomes redundant.
M.Gasperlin, L.Tusar, M.Tusar,
“Lipophilic Semisolid Emulsion Systems: Viscoelastic Behaviour and Prediction of Physical Stability by Neural Network Modelling, ”
International Journal of Pharmaceutics, Vol. 168, No. 2, pp. 243-254, 1998
The influence of different ratios of individual components (silicone surfactant, hydrophilic and lipophilic phase) on the viscoelastic behaviour of semisolid lipophilic emulsion systems was studied. The creams were prepared according to a preliminary experimental design (mixture design). The content of all three phases was varied: surfactant (1–5%), purified water (from 40 to 90%) and white petrolatum (5–59%). Oscillatory rheometry was used as the most appropriate experimental method for the evaluation of the emulsions. The rheological properties were influenced by the ratio of the components. For highly concentrated systems the predominant elastic response in the whole frequency range was measured. The cross-over point is characteristic for the concentrated systems. For the low concentrated systems, viscous behaviour is predominant. Rheometry has also been employed to follow and evaluate physical stability as one of the critical factors of emulsion systems. The dynamic rheological parameter, tan02 ∆ , has been chosen as the basis for developing mathematical models (linear, polynomial, neural) to forecast stability related to the content of the separate components in emulsion systems. After testing the linear models their non agreement to statistical criteria for a good model F reg , F lof , CC, DC, and RMS was found. The two-level neural network has been proven to be a statistically acceptable model, as were the polynomials of the second order. The two-level neural network model was also evaluated and the results have shown a great degree of reliability. The prediction of tan02 ∆ using a neural network model was found to be of great interest for the contemporary pharmaceutical formulation design because a lot of additional testing can be omitted.
J.G.Zeng and Y. Q.Shu,
“Material Nonlinear Viscoelastic Constitutive Relation of Neural Network Simulation, ”
Journal of Solid Mechanics, Vol. 1, No. 25, pp. 71-74, 2004
Creep tests at constant stress are performed for the carbon-fiber reinforced epoxy composite at various temperatures and initial stresses. A nonlinear viscoelastic constitutive model is developed, and its material parameters are determined by fitting it to creep test data. Model results are found to agree very well with the experimental data at low temperature and low stress conditions. However, the agreement deteriorates at high temperatures, particularly in the vicinity of the glass transition temperature. An alternative model based on an artificial neural network (ANN) is developed to predict the stress relaxation of the polymer matrix composite. The ANN model is trained and validated with 9000 experimental data sets obtained from stress relaxation tests performed at various constant strain (initial stress) and constant temperature conditions. Training of the ANN employs a scaled conjugate gradient method. The optimal brain surgeon algorithm is employed to optimize the topology. The optimal ANN configuration has 88 processing elements (3 in the input layer, 45 in the first hidden layer, 39 in the second hidden layer, and 1 in the output layer) and 410 links. The predictions of the ANN model are found to be more accurate over a wider range of stress and temperature conditions than those of the explicit nonlinear viscoelastic model, in particular near the glass transition temperature.
M. H.Saeidirad, A.Rohani, S.Zarifneshat,
“Predictions of Viscoelastic Behavior of Pomegranate using Artificial Neural Network and Maxwell Model, ”
Computers and Electronics in Agriculture, Vol. 98, pp. 1-7, 2013
Stress relaxation is one of the defined tests to characterize the viscoelastic properties of food and agricultural materials. Stress relaxation data are very important because they provide useful and valuable information such as fruit firmness and ripening, food processing and predicting changes in the material during mechanical loading. Viscoelastic behavior of some varieties of pomegranate that are cultivated in Iran has been studied in current research. For this purpose, stress relaxation test was conducted with three cultivars of pomegranate (Ardestani, Shishekap and Malas) for three sizes (small, medium and large). In this article the potential of artificial neural network (ANN) technique is evaluated as an alternative method for Maxwell model to predict the viscoelastic behavior of pomegranate. Neural stress relaxation models were constructed to describe stress relaxation behavior of pomegranate with respect to time. The neural models were built based upon relaxation time as input network and stress relaxation as output network. The results revealed that both ANN model and Maxwell model have high capability of producing accurate and reliable predictions for stress. (C) 2013 Elsevier B.V. All rights reserved.
J.Zheng, B.Han, C. S.Zhou,
“Research of Composite Propellant Viscoelastic Constitutive Parameters based on Genetic Algorithm, ”
Journal of Ballistic, Vol. 26, No. 1, pp. 22-25, 2014
“A Sign Control Method for Fitting and Interconverting Material Functions for Linearly Viscoelastic Solids, ”
2
1997
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
... Where nin s the neuron number of the input layer, ${{n}_{\text{out}}}$ is the neuron number of the output layer, and ${{n}_{\text{s}}}$ is constant for [1,10]. ...
“Curve Fitting Calculate Viscoelastic Material Constant, ”
1
1999
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
1
2000
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
“Relaxation Modulus in the Fitting of Polycarbonate and Poly(Vinyl Chloride) Viscoelastic Polymers by a Fractional Maxwell Model, ”
1
2002
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
“The Fitting Method of Viscoelastic Material Constant, ”
1
2005
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
“Fitting Methods for Relaxation Modulus of Viscoelastic Materials, ”
1
2007
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
“Research and Application of Modified Asphalt Nonlinear Viscoelastic Constitutive Relation, ”
1
2009
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
“Viscoelastic Material Shear Modulus Relaxation Function Fitting Study, ”
1
2010
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
“Viscoelastic Modelling of Solid Rocket Propellants, ”
2
2010
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
... Where nin s the neuron number of the input layer, ${{n}_{\text{out}}}$ is the neuron number of the output layer, and ${{n}_{\text{s}}}$ is constant for [1,10]. ...
“Identification of the Viscoelastic Parameters of a Polymer Model by the Aid of a MCMC Method, ”
1
2014
... Many researchers have studied viscoelastic material parameter fitting. Bradshaw and Brinsonfitted related parameters in the linear viscoelastic solid using a signal control method [1]. Yin analysed the curve fitting method to determine the viscoelastic material stress-strain relationship of the five constants and drew a corresponding fitting formula [2]. Li analysed experimental data to show that the fractional derivative model can substitute for a number of Prony series so that the calculation is relatively simple[3]. Jimenez et al. studied the stress relaxation parameters of two different kinds of polymer fitting under the conditions of constant temperature and strain by the generalized Maxwell model [4]. Huang and Yin analysed the fitting results of some viscoelastic damping materials and simplified the original fitting formula. This reduced the difficulty of using the curve fitting method to determine constants [5]. Duan et al. fitted the generalized Maxwell model of viscoelastic material by the Kohlrausch-William-Watts (KWW) function method of the minimum[6]. Zhan et al.analysed the performance of the linear viscoelastic generalized Maxwell model and dynamic viscoelasticity of the fractional order derivative Maxwell model, showing thatthe fractional order derivative of the fitting effect was better than others [7]. Wei et al. studied the cartilage of viscoelastic material using the method of numerical fitting and deduced the relationship between the normalized experimental curve of the simplified model and the generalized Maxwell model.The rib cartilage materials were used for viscoelastic finite element analysis of Maxwell model parameters [8]. At the same time, Yin et al.determined that fractional order calculus can be used to describe the asphalt mixture of fractional derivative viscoelastic constitutive relation, and they obtained good fitting effects[9]. Shekhar and Sahasrabudhe proposed the fluid Maxwell viscoelastic model for solid rocket propellant, which can predict some material coefficients of solid rocket propellant through a uniaxial tensile experiment [10]. Haario et al. recognized viscoelastic parameters of the polymer model usingthe Markov chain Monte Carlo (MCMC) method [11]. ...
“Lipophilic Semisolid Emulsion Systems: Viscoelastic Behaviour and Prediction of Physical Stability by Neural Network Modelling, ”
1
1998
... Neural networks in the parameter fitting of viscoelastic materials also have many applications.Gasperlin et al. put forward predicting the viscoelastic behaviour of emulsion systems through a neural network based mathematical model. It had certain precision [12]. Zeng and Shu gave an equivalence relation of a three layer delay feed forward neural network to the Green Rivlin nonlinear viscoelastic constitutive equation, which solved the nuclear function by the network in various order of the G R equation. They pointed out that the neural network method can be widely applied to the material constitutive relation research [13]. Al-Haik et al. studied the stress relaxation behavior of polymer composites based on artificial neural networks. They accurately predicted a wider range of nonlinear viscoelastic models[14]. Saeidirad et al. studied the viscoelastic behavior of pomegranates with an artificial neural network, and the predicted results were more accurate [15]. Zheng et al.studied the method of whole loading process of relaxation modulus based on a genetic algorithm to accurately obtain the viscoelastic constitutive parameters of HTPB composite solid propellant [16]. ...
“Material Nonlinear Viscoelastic Constitutive Relation of Neural Network Simulation, ”
2
2004
... Neural networks in the parameter fitting of viscoelastic materials also have many applications.Gasperlin et al. put forward predicting the viscoelastic behaviour of emulsion systems through a neural network based mathematical model. It had certain precision [12]. Zeng and Shu gave an equivalence relation of a three layer delay feed forward neural network to the Green Rivlin nonlinear viscoelastic constitutive equation, which solved the nuclear function by the network in various order of the G R equation. They pointed out that the neural network method can be widely applied to the material constitutive relation research [13]. Al-Haik et al. studied the stress relaxation behavior of polymer composites based on artificial neural networks. They accurately predicted a wider range of nonlinear viscoelastic models[14]. Saeidirad et al. studied the viscoelastic behavior of pomegranates with an artificial neural network, and the predicted results were more accurate [15]. Zheng et al.studied the method of whole loading process of relaxation modulus based on a genetic algorithm to accurately obtain the viscoelastic constitutive parameters of HTPB composite solid propellant [16]. ...
... In this paper, we use the mean square error function as the performance function of the neural network. It is used to evaluate the difference between the actual network output and the target, and the formula is given in [13]. For q samples of network output, the form is ...
“Prediction of Nonlinear Viscoelastic Behaviorof Polymeric Composites using an Artificial Neural Network, ”
1
2006
... Neural networks in the parameter fitting of viscoelastic materials also have many applications.Gasperlin et al. put forward predicting the viscoelastic behaviour of emulsion systems through a neural network based mathematical model. It had certain precision [12]. Zeng and Shu gave an equivalence relation of a three layer delay feed forward neural network to the Green Rivlin nonlinear viscoelastic constitutive equation, which solved the nuclear function by the network in various order of the G R equation. They pointed out that the neural network method can be widely applied to the material constitutive relation research [13]. Al-Haik et al. studied the stress relaxation behavior of polymer composites based on artificial neural networks. They accurately predicted a wider range of nonlinear viscoelastic models[14]. Saeidirad et al. studied the viscoelastic behavior of pomegranates with an artificial neural network, and the predicted results were more accurate [15]. Zheng et al.studied the method of whole loading process of relaxation modulus based on a genetic algorithm to accurately obtain the viscoelastic constitutive parameters of HTPB composite solid propellant [16]. ...
“Predictions of Viscoelastic Behavior of Pomegranate using Artificial Neural Network and Maxwell Model, ”
1
2013
... Neural networks in the parameter fitting of viscoelastic materials also have many applications.Gasperlin et al. put forward predicting the viscoelastic behaviour of emulsion systems through a neural network based mathematical model. It had certain precision [12]. Zeng and Shu gave an equivalence relation of a three layer delay feed forward neural network to the Green Rivlin nonlinear viscoelastic constitutive equation, which solved the nuclear function by the network in various order of the G R equation. They pointed out that the neural network method can be widely applied to the material constitutive relation research [13]. Al-Haik et al. studied the stress relaxation behavior of polymer composites based on artificial neural networks. They accurately predicted a wider range of nonlinear viscoelastic models[14]. Saeidirad et al. studied the viscoelastic behavior of pomegranates with an artificial neural network, and the predicted results were more accurate [15]. Zheng et al.studied the method of whole loading process of relaxation modulus based on a genetic algorithm to accurately obtain the viscoelastic constitutive parameters of HTPB composite solid propellant [16]. ...
“Research of Composite Propellant Viscoelastic Constitutive Parameters based on Genetic Algorithm, ”
1
2014
... Neural networks in the parameter fitting of viscoelastic materials also have many applications.Gasperlin et al. put forward predicting the viscoelastic behaviour of emulsion systems through a neural network based mathematical model. It had certain precision [12]. Zeng and Shu gave an equivalence relation of a three layer delay feed forward neural network to the Green Rivlin nonlinear viscoelastic constitutive equation, which solved the nuclear function by the network in various order of the G R equation. They pointed out that the neural network method can be widely applied to the material constitutive relation research [13]. Al-Haik et al. studied the stress relaxation behavior of polymer composites based on artificial neural networks. They accurately predicted a wider range of nonlinear viscoelastic models[14]. Saeidirad et al. studied the viscoelastic behavior of pomegranates with an artificial neural network, and the predicted results were more accurate [15]. Zheng et al.studied the method of whole loading process of relaxation modulus based on a genetic algorithm to accurately obtain the viscoelastic constitutive parameters of HTPB composite solid propellant [16]. ...
“Generalized Maxwell Model of Viscoelastic Material, ”
1
2006
... The multiple Maxwell model and a spring in parallel is the generalized Maxwell model, as shown in Figure 1, where Ei is the elastic modulus of the ith original elastic and ${{\eta }_{i}}$ is the viscosity coefficient of the ith original viscosity. Each Maxwell model of the stress-strain relationship is $\dot{\varepsilon }\text{=}{{\sigma }_{i}}/{{\eta }_{i}}+{{\dot{\sigma }}_{i}}/{{E}_{i}}$. By differential operator, the stress ofexpressionis${{\sigma }_{i}}=\frac{{{E}_{i}}{{\eta }_{i}}}{{{E}_{i}}+{{\eta }_{i}}D}D\varepsilon $, $D=d/dt.$ Adding up the stress of each Maxwell model, the spring stress is the total stress of the generalized Maxwell model [17-18], that is, ...
“Viscoelastic Analysis of Solid Rocket Propellant based on the BP Neural Network, ”
3
2014
... The multiple Maxwell model and a spring in parallel is the generalized Maxwell model, as shown in Figure 1, where Ei is the elastic modulus of the ith original elastic and ${{\eta }_{i}}$ is the viscosity coefficient of the ith original viscosity. Each Maxwell model of the stress-strain relationship is $\dot{\varepsilon }\text{=}{{\sigma }_{i}}/{{\eta }_{i}}+{{\dot{\sigma }}_{i}}/{{E}_{i}}$. By differential operator, the stress ofexpressionis${{\sigma }_{i}}=\frac{{{E}_{i}}{{\eta }_{i}}}{{{E}_{i}}+{{\eta }_{i}}D}D\varepsilon $, $D=d/dt.$ Adding up the stress of each Maxwell model, the spring stress is the total stress of the generalized Maxwell model [17-18], that is, ...
... References [18-19] provided the derivation process forthe constitutive relation and integral constitutive relation of the generalized Maxwell model. The expression of the relaxation modulus of $Y(t)$ is ...
... In the traditional fitting method, we use the Prony series fitting method to fitting the material relaxation modulus, and selecting a low number leads to poor fitting precision. However, if an infinite number is takenin order to pursue precision, this instead complicates the expression and makes fitting difficult. The fractional derivative model fitting has higher fitting precision than the Prony series, and the fitting parameters are less than those of the Prony series. However, the fractional derivative model also has some disadvantages, such as a complex constitutive equation derivation process, and the Mittag-Leffler function in the selection of the series number determines the complexity of the constitutive equation [18]. The neural network has the ability to gain any function approximation with any degree of accuracy; thus, it has been widely used in function fitting. ...
1
2004
... References [18-19] provided the derivation process forthe constitutive relation and integral constitutive relation of the generalized Maxwell model. The expression of the relaxation modulus of $Y(t)$ is ...
1
2007
... A neural network is created by a standard toolkit network that creates functions and corresponds to a certain network type. However, different learning training algorithms will not be able to use the standard function to create. This requires the application of a custom network method. A custom network is implemented by invoking the network function. The network object contains many properties, thereby changing the network structure, algorithm, function, etc. Reference [20] gives a specific custom neural network program. ...
2
2009
... Where ${{\tau }_{i}}={{\eta }_{i}}/{{G}_{i}}$, ${{G}_{e}}=G(\infty )$, and $G(\infty )$ are the equilibrium modulus, ${{G}_{i}}$ is the shear modulus of elasticity of each Maxwell model, and ${{\eta }_{i}}$ is the viscous coefficient [21]. ...
... When the neuron number of hidden layer is n,the empirical Equation[21] is ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}