A Sequential Inspection Model based on Risk Quantitative Constraint and Component Importance
|
A Sequential Inspection Model based on Risk Quantitative Constraint and Component Importance |
| Bai Senyang,Cheng Zhijun,Zhao Qian,Jia Xiang,Yao Hang |
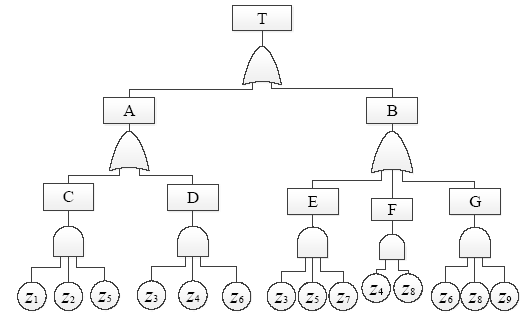
| Figure 3 Fault tree model of inertial navigation system |
|
|